




The sensors are aligned perfectly to reduction gearing. Setting up can be tricky - a multimeter comes in handy for testing, and making position adjustments.

|  |
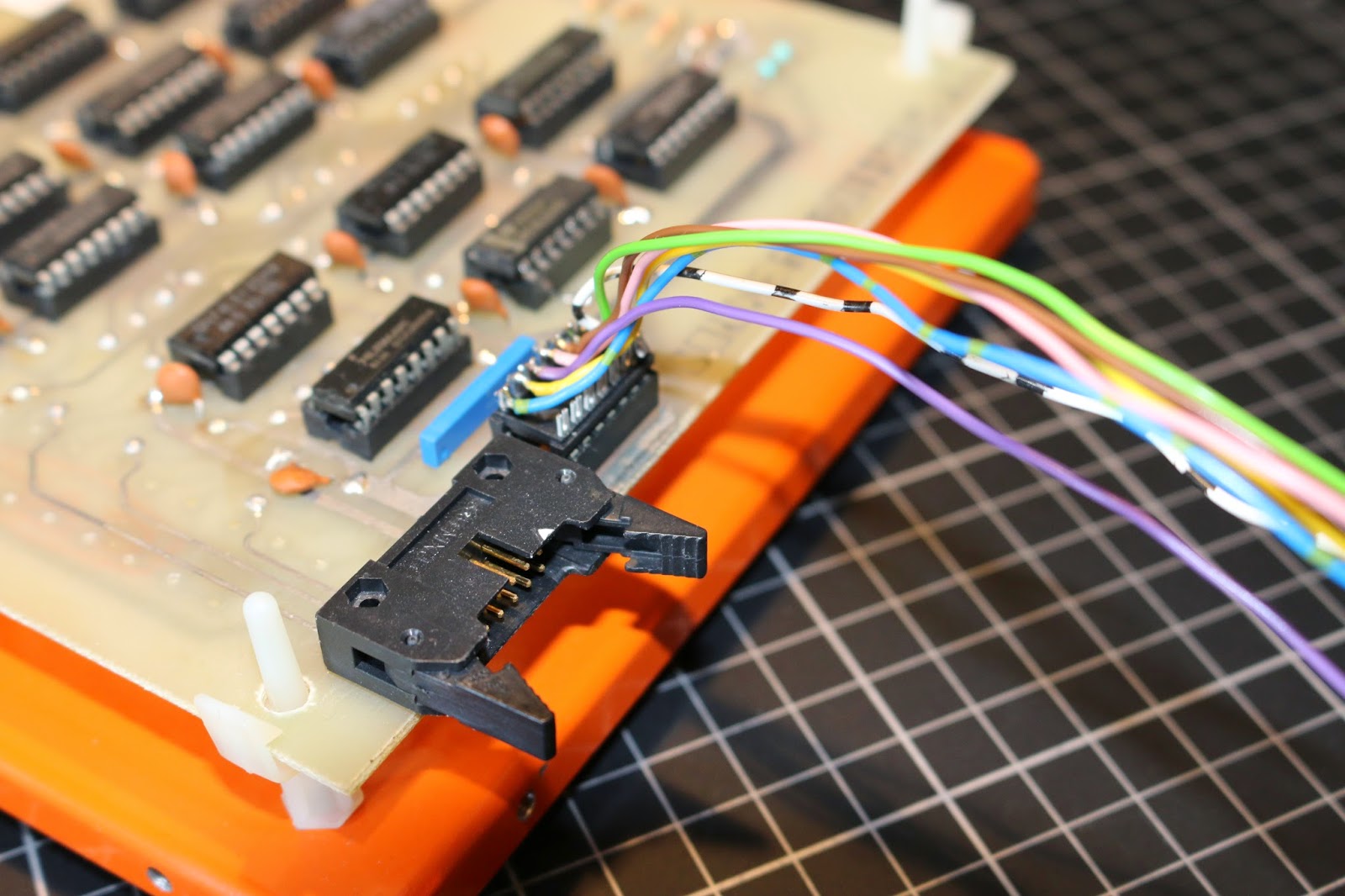
The new 6-core wiring harness, connecting the four sensors mounted on the rear support bar, front-mounted gripper sensor, and Base position sensor was installed:

The hand sensor is still a mystery, see previous post Magnet Madness
For now, accepting the fact this won't do anything useful, have purposefully left disconnected and will decided later what I'm doing here.
Update: Its a shame Colne Robotics didn't invest in designing a decent gripper tension feedback mechanism similar to that employed in the Microbot MiniMover-5 triggering a micro-switch contact under tension, or the gripper is completely closed.

| 
|
Another grey area in the instructions is chassis grounding - prototype models had their 7805 voltage regulator bolted to the chassis which grounds the circuit to the metal work. Later, single-interface models do not do this, so a chassis ground cable was included in my wiring. This will allow me to easily switch between interface circuits.

Tracing the circuit, the majority of the 14-pin header for the feedback sensors are ground connections.
Also, note, in Input Mode, the port address line D2 (header pin 8) is spare - no connection
This configuration is likely to change, but these are my current assignments:
| Microswitch Assignment to Functions | INPUT BIT | CABLE / PIN |
| Forearm | MS1 (D3) | Yellow (13) |
| Left Wrist | MS2 (D4) | Brown (12) |
| Right Wrist | MS3 (D5) | Green (9) |
| Shoulder | MS4 (D6) | Pink (11) |
| Gripper | MS5 (D7) | Purple (9) |
| Base | MS6 (D8) | Blue-Green (14) |