I appreciate it's been a while since updating the blog, but I'm pleased to reveal the latest addition to our family...
Photographs of the grand arrival :


Hiding inside was a very well packaged Armdroid 1 :

To bring you up to speed.... A couple of weeks ago, an opportunity came up to purchase another Armdroid. There was a very good reason for this.... This particular model has the later generation of interface circuit. You may recall, my working Armdroid is a prototype model, and programming this is completely different to the more common production models.
By having both interface boards at my disposable means I can develop and support software that will run on either interface. I intend to develop a software library supporting both types of interface, and all my future software will be based on this library. This will be good news for other Armdroid enthusiasts!
This Armdroid was purchased and shipped over from the USA.
Chris, if your reading, many thanks once again for your excellent packaging - as you can see, we arrived in one piece!
The metal work is in fantastic condition, and all the running gears and pulleys are all in good condition. Interestingly, the stepper motors for the Shoulder and Elbow are not the standard ID35 steppers. I haven't identified them as they have no visible manufacturer markings.

The large 37-way D-type connector shown above is not standard.
A quick inspection of the PCB :

I soon discovered that 37-way D connector is a modification whereby somebody has wired directly to the motor coils, completely bypassing the interface circuit altogether. Perhaps this means the board is dead?
The arm was carefully carried to my study to begin removal of the PCB and one Stepper Motor which will be used later for bench testing:


This would appear to be an Issue 4 board with a Copyright of 1981 by Colne Robotics Ltd.
On further inspection - apart from being very dusty, condition looks good. Two of the ULN2003A Darlington Array Drivers have been replaced with ECG2013 equivalents, but I don't think there is anything here which can't be replaced, or repaired.
I made detailed notes of the wiring and setup used by this Armdroid. Noticed the wiring for the stepper motor coils is not per the manual which talks about exchanging Qb and Qc by hardware switching these lines. More on this later.
I then decided to employ the same highly specialised & advanced cleaning process that Rudi Niemeijer from the Netherlands used to clean his circuit board....


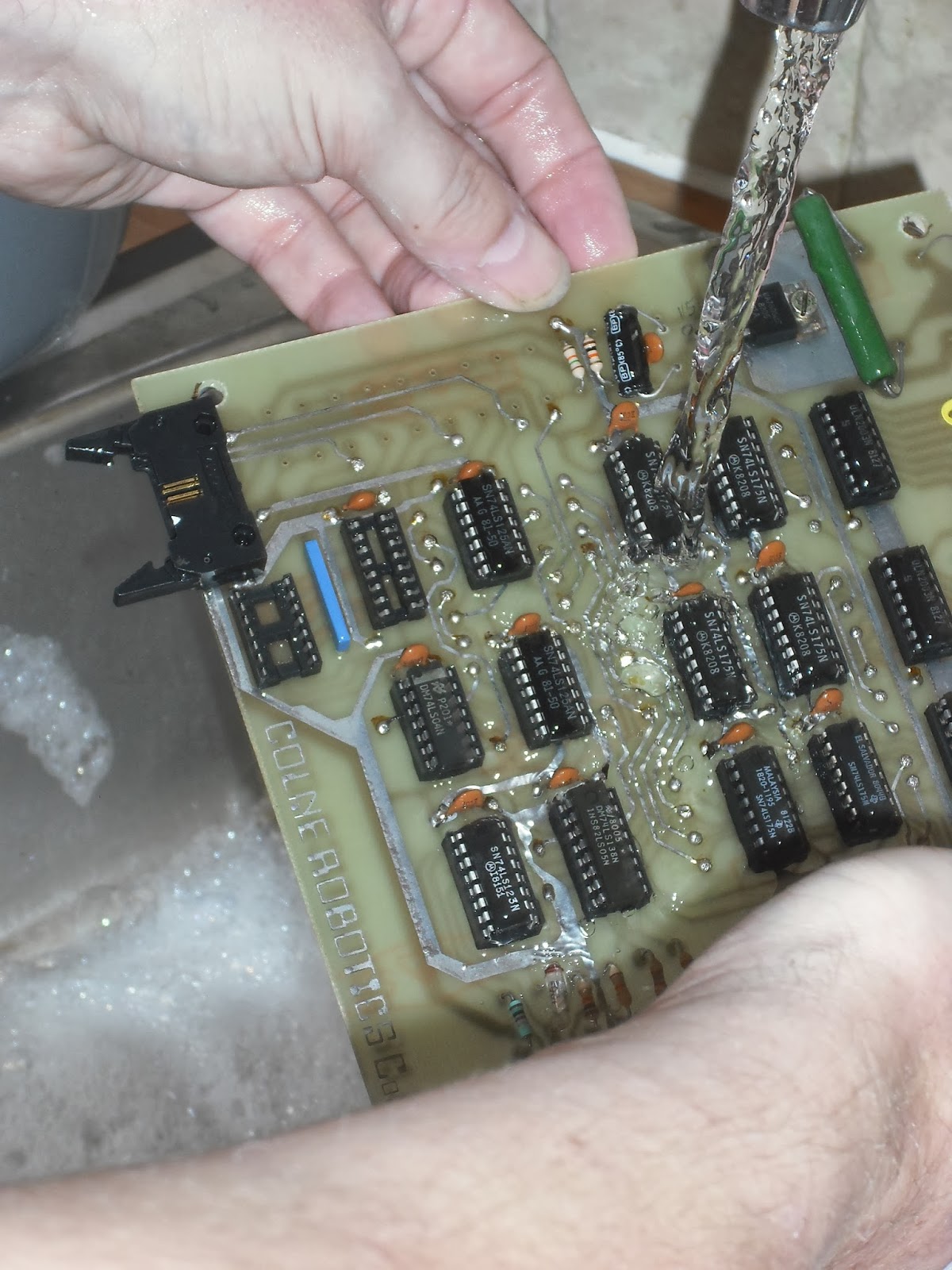
Yep, a bath in soapy warm water using a soft brush, and finally, a good rinsing to remove all residual detergent. This circuit board will now be left out dry for several hours!
Disclaimer: Don't go washing any old PCB without first checking for Batteries or Paper-based Capacitors!
I need to makeup a 10way IDC ribbon cable and get the appropriate connectors before I will be in a position to start bench testing. I will be documenting my approach to testing and fault finding processes over the next weeks. This should help other readers with their restoration projects.
I'm actually hoping to get all this accomplished by 15th March in time for the 1st Peterborough Raspberry Jam which I will be attending and demonstrating at the show & tell.
I also want to modify all the wiring inside my Armdroid to easily accommodate either interface board, this means the power and stepper motor connections will need some consideration as the boards currently use different connection methods.
And what will happen to the rest of this newly acquired Armdroid hardware you might be thinking? Hasn't really been decided, maybe will be used for spare parts, be refurbished, or used as an experimental platform for more advanced projects.
Finally, changing subject.... I've been playing with a newly purchased Arduino Leonardo that I will also be supporting with my Armdroid Library, so plenty of exciting developments to look forward here...

See this getting started guide for more information.
I'll be blogging later how to setup the Ardunio IDE on Windows 8
Additional photographs :


















No comments:
Post a Comment